Ein Quadrocopter ist ein unbemanntes Flugobjekt und wird häufig als Drohne oder Multicopter bezeichnet. Die spezielle Eigenschaft eines Quadrocopters ist, dass dieser vier Motoren beziehungsweise vier Rotoren besitzt. Bei der Planung beziehungsweise Fertigung eines Quadrocopters müssen folgenden Punkte beachtet werden.
Auswahl der Bauteile
Für den Quadrocopter wurden folgende Einzelteile verwendet:
- 4 Rotoren (zweimal linksdrehend, zweimal rechtsdrehend)
- 4 Motoren (Die Motoren können insgesamt ca. 610 Gramm tragen)
- 4 Geschwindigkeitsregler
- Lithium-Polymere-Akkumulator mit einer Kapazität von 2200 mAh, was für ca. 15 min Flug ausreicht
- Flugsteuerung
- Fernsteuerung und dazugehörigen Empfänger
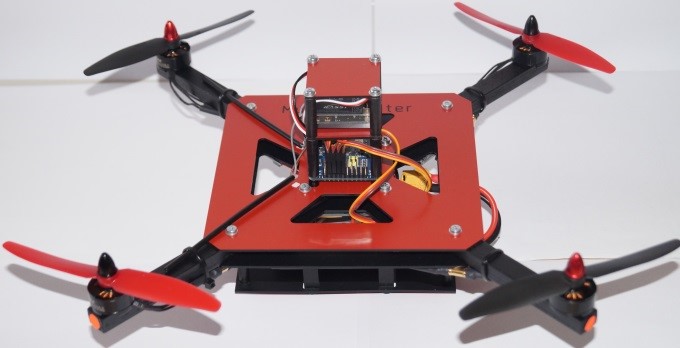
Fertigung des Rahmens
Der Rahmen wurde mit einer CNC-Fräsmaschine (KOSY) gefertigt. Dabei wurde ein Gravur-Kunststoff und Kiefernholz verwendet. Für alle Bauteile des Rahmens müssen bei der Auswahl die Kriterien Optik, Ausstattung, Größe, Preis, Stabilität, Gewicht, Material und Montagemöglichkeiten berücksichtig werden.
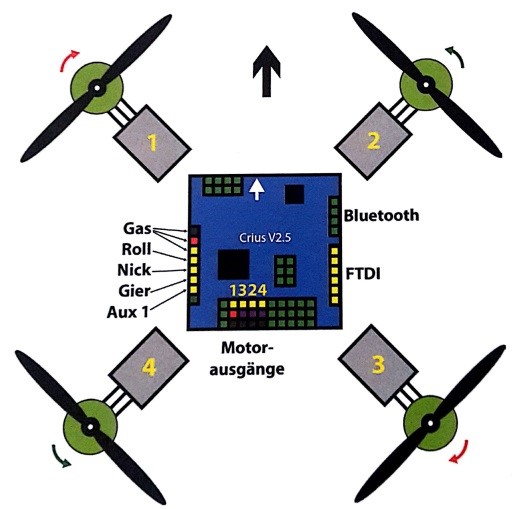
Installation der Flugsteuerung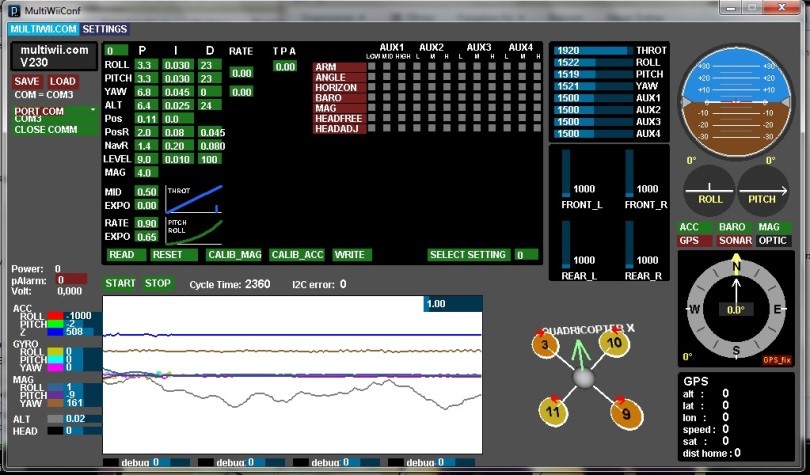
Die Flugsteuerung eines Multicopters wird oft als dessen Herz bezeichnet. Für den hier beschriebenen Quadrocopter wurde eine Flugsteuerung von MultiWii verwendet, welches ein Open-Source-Projekt ist. Bei der MultiWii besteht die Installation aus drei Teilen, mit eigenen Unterpunkten:
- Konfiguration der Software:
Anpassen einer Software an die Erfordernisse des Systems mit Arduino - Kalibrieren der Sensoren:
Vergleich bestimmter Messdaten und in Übereinstimmung mit den korrekten Werten bringen in der MultiWiiConf Software - Anschluss der Hardware und zusätzlichen Komponenten